
Technology
Panasonic Hd Develops Ai Technology For Efficient Path Planning For Autonomous Robots In Environments Where Various Robots Coexist With Humans

Panasonic Holdings Co., Ltd. (Panasonic HD) has developed a new technology for efficient path planning, which is expected to expand the use of autonomous robots in environments where people and multiple robots coexist in a limited space, such as indoors.
In recent years, autonomous robots have been developed and field-tested to deal with labor shortages caused by a shrinking workforce. To be applicable to actual sites, the system must be able to run without problems in an environment where pedestrians or multiple robots under the control of other systems coexist. As the robot repeatedly decelerates and stops when avoiding collisions, there is a stochastic delay in the time it takes to reach its destination. In such an environment, setting a route for a robot that can efficiently and autonomously travel to its destination is extremely difficult.
In response to these issues, Panasonic HD has developed a new technology that enables the efficient planning of travel paths by updating the probability distribution parameters related to the robot’s transit time using Bayesian inference.
This method’s problem setting and advancedness have been internationally recognized, resulting in its acceptance for AAMAS 2023 (The 22nd International Conference on Autonomous Agents and Multiagent Systems)*1, the top conference for multi-agent technology. It will be presented at the poster session held in London (Monday, June 1, 2023).
Overview:
Among the use cases where autonomous robots are expected to contribute to labor shortages, many examples include narrow corridors where autonomous mobile robots cannot pass each other, such as corridors in buildings. Additionally, corridors are often filled with passers-by and various types of robots under the control of other systems. (Fig. 1)
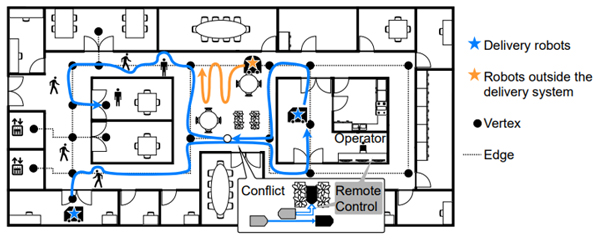
Figure 1. Overview of task setting for in-building robot delivery (cited from the published paper [1]). Delivery robots (blue line) deliver products from the store to customers in conference rooms in the building, while a remote operator monitors multiple robots. The robots proceed while avoiding pedestrians and cleaning robots (orange line) that are directed by other systems.
In such an environment, autonomous robots must slow down or pause to avoid moving obstacles. Consequently, there is a stochastic delay in the time for the robot to traverse the corridor. And in many cases, the probability distribution of this delay is unknown beforehand, or only limited prior information is available. Therefore, it is necessary to develop a method to create the next plan based on the delay observed while the robot operates.
MAPF (Multi-agent Path Finding) has been studied and applied to the problem of creating collision-free paths for multiple robots on a grid-like graph. Still, conventional methods assume that the probability distribution of delays can be accurately modeled. Applying these methods to real-world situations where the number of people and robots in the corridor fluctuates is difficult.
Therefore, we defined a type of MAPF on non-grid like graph, where the travel times of robots are stochastically distributed, and the true distribution is unknown. We proposed a method to update the parameters of the probability distribution using Bayesian inference.
We modeled the delay of a robot running a particular path (edge in the graph) with a gamma distribution with unknown parameters. The parameters of the delay probability distribution were inferred using observed values of delays obtained during plan execution. By creating an optimal route plan based on the estimated parameters, we achieved efficient route planning even in an environment that is highly difficult for autonomous mobile robots to traverse. We demonstrated the effectiveness of this method through comparative experiments with existing methods. (Figure 2)
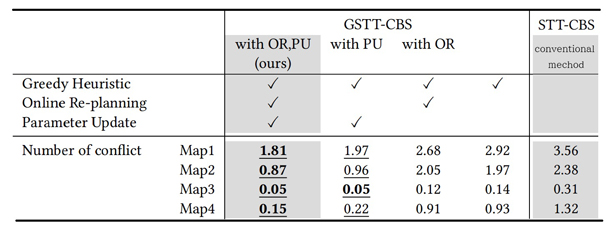
Figure 2. Simulation results of the proposed method (cited from the published paper [1]). The average number of conflicts over the execution of 100 tasks is shown. The proposed method (leftmost column) achieves fewer conflicts than the existing method (rightmost column).
Future Outlook:
The newly developed path planning method for autonomous mobile robots is a technology that expands the use of autonomous robots in environments where humans and various robots coexist, which has been difficult to apply in the past.
Encouraged by the international recognition of our development results in areas that are indispensable for the social implementation of AI in the real world, we will continue to work hard with researchers inside and outside our company to develop “AI technology that contributes to the happiness of our customers.”
*1 The 22nd International Conference on Autonomous Agents and Multiagent Systems (AAMAS 2023) is an authoritative top conference in the multi-agent field. Known for being a place for AI researchers around the world to present and discuss their latest achievements, this year’s event will be held in London from May 29 to June 2.


IBM z17: The First Mainframe Fully Engineered for the AI Age
New Innovations Unlock Capabilities for Enterprise-Scale AI, Including Large Language Models and Generative AI User Experience Reimagined via new Assistants...


Brewing Excellence’ – Emirates offers a world class range of coffee to connoisseurs
Celebrating International Coffee Day on 1 October, Emirates highlights the wide array of artisan coffee served in Emirates lounges and...


Emirates’ Premium Economy to extend to São
Premium Economy to be introduced on Emirates’ A380 service to São Paulo from 19 November, representing the first in Emirates’...


Metro Bank Women’s Team of The Year Announced
Best domestic XI selected by PCA MVP Rankings, powered by Argentex Georgia Adams captains the 2023 Metro Bank PCA Women’s...


Honda and Acura Electric Vehicles Will Have Access to Largest EV Charging Networks in North America Aided by New Agreements with EVgo and Electrify America
New agreements add single-app access to EVgo and Electrify America charging networks, plus roaming partners, through the HondaLink® and Acura...


Oracle Partners with TELMEX-Triara to Become the Only Hyperscaler with Two Cloud Regions in Mexico
Oracle opens new region in Monterrey in partnership with Teléfonos de México (TELMEX-Triara) and continues expanding its global cloud region...
Cosmic Web Lights Up in the Darkness of Space
Like rivers feeding oceans, streams of gas nourish galaxies throughout the cosmos. But these streams, which make up a part...
75% of Companies Struggling with IT Operational Challenges in a Hybrid World
HP Inc. (NYSE: HPQ) announced the findings of a new commissioned study, conducted by Forrester Consulting, highlighting the need for...
Visa Program Combats Friendly Fraud Losses For Small Businesses Globally
Visa Inc. (NYSE:V), a world leader in digital payments, spotlighted the evolution of its dispute program, making it easier for...


New study measures the coca-cola system’s u.s. Economic contributions at $57.8 billion in 2022
In the United States, The Coca‑Cola Company and 64 independently owned bottlers, collectively the Coca‑Cola system, contributed $57.8 billion in...
-

 Auto2 years ago
Auto2 years agoHonda Marine Debuts All-New BF350 Outboard Company’s First V8 Motor Available Commercially, Flagship Model Offers Premium Power and Unparalleled Performance for Extraordinary Boating Experiences
-

 Auto2 years ago
Auto2 years agoNew Features Further Increase Desirability Of Bentayga Range
-
Technology2 years ago
Oracle Partners with TELMEX-Triara to Become the Only Hyperscaler with Two Cloud Regions in Mexico
-
Auto2 years ago
Honda and Acura Electric Vehicles Will Have Access to Largest EV Charging Networks in North America Aided by New Agreements with EVgo and Electrify America
-

 Lifestyle2 years ago
Lifestyle2 years ago2023 Nike World Basketball Festival Brings the Best of Basketball Style, Culture and Community